About
The inverted pendulum is a classic feedback control problem. The coupled physical system exhibits complex behavior which can make it difficult to control. In this project I aim to tackle the problem from the ground up, using a derived kinematic model to simulate the effects of different feedback control techniques on the system. Eventually, I will build and program an inverted pendulum bot from scratch.
Source Code
Simulation
A proof-of-concept Matlab simulation shows that two nested PID controllers can successfully drive the robot to a desired position.
Robot
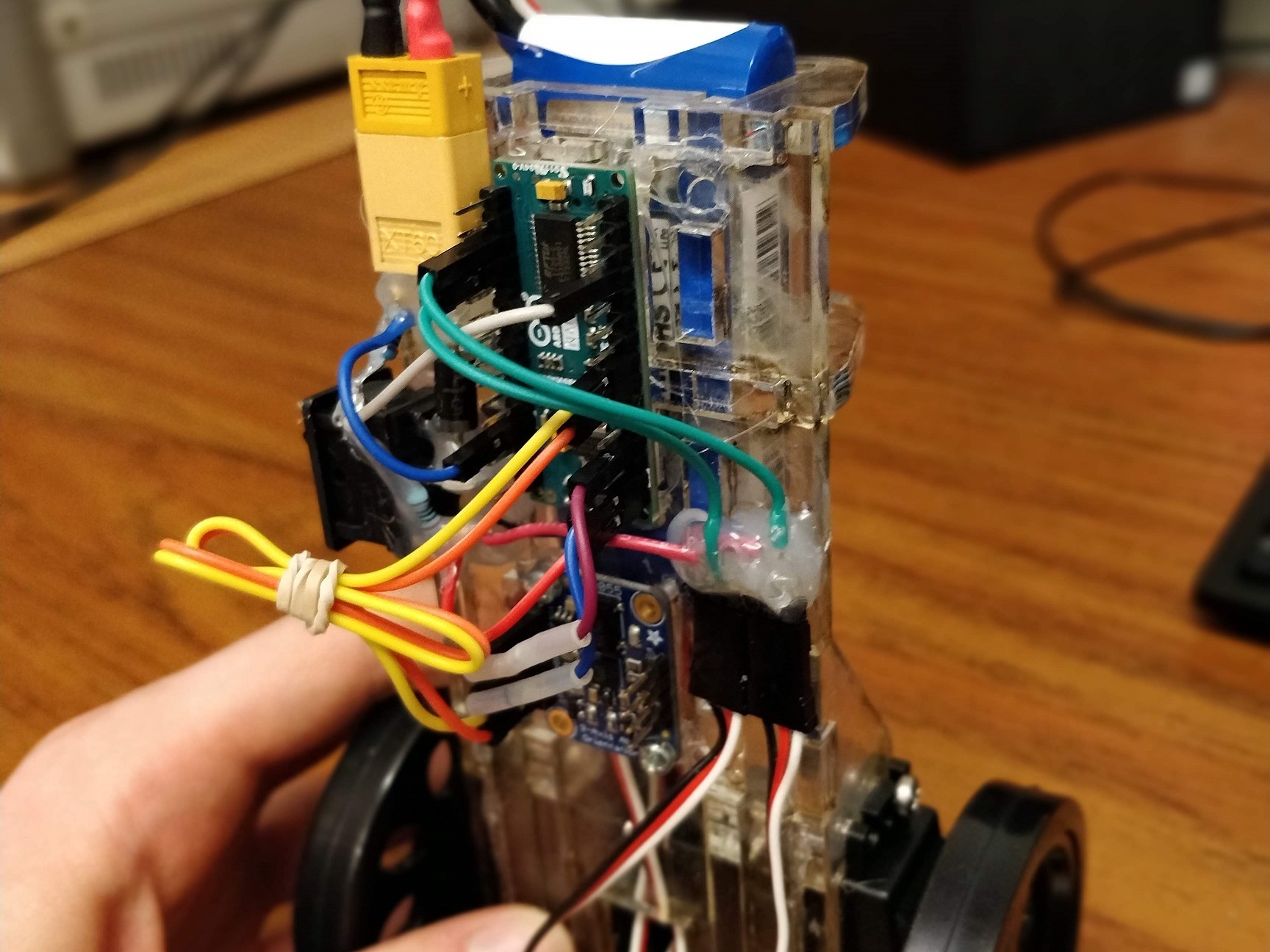
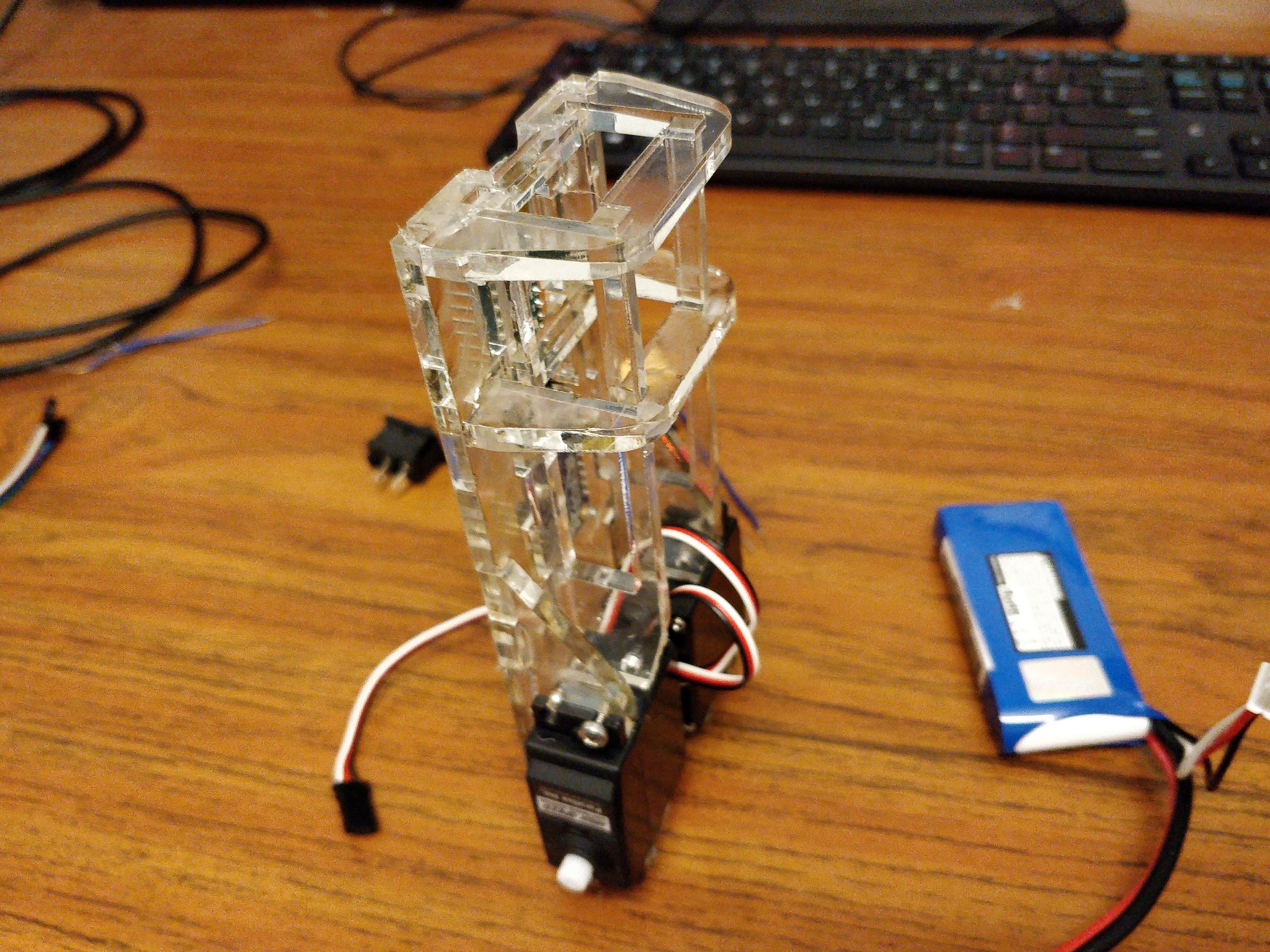
The robot itself uses an Arduino Nano and other off-the-shelf parts. An on-board IMU package provides a way to measure orientation while high-speed continuous rotation servos allow for easy control of the robot's wheel speeds. The parts for the chassis are laser cut acrylic.